演示視頻詳見詳情底部
無人機(jī)載植被冠層太陽光誘導(dǎo)葉綠素?zé)晒饧翱梢?amp;近紅外反射光譜測試系統(tǒng)
基本原理
日光誘導(dǎo)葉綠素?zé)晒獗O(jiān)測系統(tǒng)與旋翼無人機(jī)的結(jié)合開辟了精準(zhǔn)農(nóng)業(yè)監(jiān)測的新型應(yīng)用�����。葉綠素?zé)晒獍S富的光合信息,通過提取能夠表征植被�、農(nóng)作物、葉片��、樹木冠層等反射光譜信號中的熒光信息��,再結(jié)合熒光參數(shù)��、葉綠素等生理生化參數(shù)(地面瞬時(shí)環(huán)境條件下測定)����,可判斷不同環(huán)境下(肥料、水分����、病脅迫、病蟲害等)作物的葉綠素?zé)晒夤庾V特征及其熒光指標(biāo)與其他參數(shù)(對冠層溫度���、表面的輻照度����、葉綠素含量測量)之間的關(guān)系,因此機(jī)載葉綠素?zé)晒獗O(jiān)測技術(shù)是高效�����、適時(shí)�����、快速����、靈敏�����、無損探測作物植被等生理狀態(tài)及其與所處環(huán)境關(guān)系的理想監(jiān)測技術(shù)����,可廣泛應(yīng)用于評價(jià)植被等的健康狀態(tài)。

系統(tǒng)配置技術(shù)指標(biāo):
|
型號
|
DJ-M600Pro
|
飛控系統(tǒng)��,高清圖傳�����,長時(shí)續(xù)航,增穩(wěn)云臺��,智能飛行電池���。
|
|
型號
|
可見-近紅外植被反射光譜測量
系統(tǒng)(350-1000nm)
|
(標(biāo)準(zhǔn)版本)
|
|
可見近紅外植被反射光譜以及
葉綠素?zé)晒鉁y量系統(tǒng)(350nm-
1000nm&650-800nm)
|
(升級版)
|
|
可見& 近紅外植被反射光譜
(350nm-1700nm)以及葉綠素
熒光測量(650nm-800nm)系統(tǒng)測
量系統(tǒng)
|
(高配版)
|
|
定制版本
|
可見-近紅外反射光譜測量(350-1700nm)
|
|
可見近紅外植被反射
&
葉綠素?zé)晒鉁y試光譜測量
|
技術(shù)指標(biāo)
|
可見-近紅外光譜儀
|
葉綠素?zé)晒鉁y試光譜儀
|
近紅外光譜儀
|
|
光譜范圍
|
350-1000nm
|
650-800nm
|
900-1700nm
|
|
光譜儀狹縫SMA
|
50um
|
1mm高x25um寬
|
1.8 x 0.025mm
|
|
通訊方式
|
USB2.0
|
USB2.0
|
Micro USB
|
|
探測器尺寸
|
14um*200um
|
24um*24um
|
Single 1mm InGaAs
|
|
像素
|
2048 Pixels
|
1044*64(總共)/
1024*58(有效)
|
228Pixels
|
|
光譜采樣間隔
|
0.3nm
|
0.17nm
|
3.5nm
|
|
信噪比SNR
|
250:1(滿信號)
|
1000:1
|
> 5,000:1
in 1s scan
|
|
Fiber input
|
SMA905
|
SMA905
|
SMA905
|
|
A/D轉(zhuǎn)換
|
16bit
|
18bit
|
24bit
|
|
功能描述
|
光譜校準(zhǔn)
|
采用Hg��、Ne��、Ar等作為標(biāo)準(zhǔn)光源對光譜進(jìn)行波長校準(zhǔn)定標(biāo)�����。
|
|
實(shí)時(shí)太陽光采集校準(zhǔn)系統(tǒng)
|
A���、因探測器探測結(jié)果與太陽直接輻射的強(qiáng)度、方向以及散射輻射的強(qiáng)度及其空間分布相關(guān)�,所有采樣余弦校準(zhǔn)器結(jié)構(gòu)實(shí)時(shí)獲取太陽光光照信息,使得探測器精準(zhǔn)的按照余弦定律來采集��,用于相對光譜強(qiáng)度和**光譜強(qiáng)度測量�、發(fā)射光譜測量等。
B��、在對地(或者植被目標(biāo))一側(cè)同樣有一個(gè)余弦校準(zhǔn)器結(jié)構(gòu)����,可快速的獲取到目標(biāo)的亮度等信息����。
C����、系統(tǒng)在出廠時(shí),利用國家計(jì)量單位標(biāo)定的光源系統(tǒng)完成**輻射亮度定標(biāo)(pw.cm2sr-1nm-1)�。
|
|
光纖傳導(dǎo)
|
光纖使用特殊結(jié)構(gòu),同步采集上行和下行的輻射及暗背景信號����。
內(nèi)置不同探測器收集同一標(biāo)定區(qū)域的平均光譜。
|
|
暗背景采集
|
采樣電子Shutter���,在光纖入光口前設(shè)計(jì)電子快門結(jié)構(gòu),通過控制主板發(fā)送相應(yīng)的指令��,Shutter實(shí)現(xiàn)不
同采集環(huán)境下的背景信號(上行和下行均設(shè)計(jì)有快門結(jié)構(gòu))���。
|
|
成像鏡頭
|
采用35mm/50mm定焦鏡頭�����,通過相應(yīng)的技術(shù)定標(biāo)處理�,使得不同焦距鏡頭下,內(nèi)置各種探測器能夠采
集到特定區(qū)域的平均光譜而無監(jiān)控偏差�。
|
|
輻射校準(zhǔn)
|
**輻射定標(biāo)。
|
|
輔助相機(jī)
|
借助輔助攝像功能�,可以獲取監(jiān)控目標(biāo)區(qū)域的RGB等圖像,以便更好的對研究區(qū)域進(jìn)行定位�����。
系統(tǒng)搭載在無人機(jī)上�����,通過無人機(jī)的圖傳模塊�,可以觸發(fā)系統(tǒng)進(jìn)行采集,所采集的區(qū)域可以通過輔助相
機(jī)拍攝視場中標(biāo)定的指示區(qū)域來確定����。
|
|
GPS定位
|
獲取被監(jiān)測對象的經(jīng)緯度信息,獲取太陽升降時(shí)間的信息���,以便觸發(fā)系統(tǒng)運(yùn)行與關(guān)閉等功能�。
同時(shí)也可以利用無人機(jī)的GPS模塊�,軟件可以對其各參數(shù)進(jìn)行記錄���,提高采集數(shù)據(jù)位置信息的精準(zhǔn)度。
|
|
多種數(shù)據(jù)格式輸出等
|
輸出txt格式的文本數(shù)據(jù)�����;數(shù)據(jù)存儲在內(nèi)置SD存儲卡��;
|
|
操作系統(tǒng)
|
樹莓派����。
|
|
系統(tǒng)封裝
|
系統(tǒng)所有涉及到的硬件結(jié)構(gòu)全部封裝在相應(yīng)的運(yùn)輸箱體內(nèi)部。
無需對光纖�����、信號線等進(jìn)行大量的拆卸�����。適合長時(shí)間野外目標(biāo)監(jiān)測使用����。內(nèi)部結(jié)構(gòu)布局��、材料選擇均符
合技術(shù)應(yīng)用需求。
|
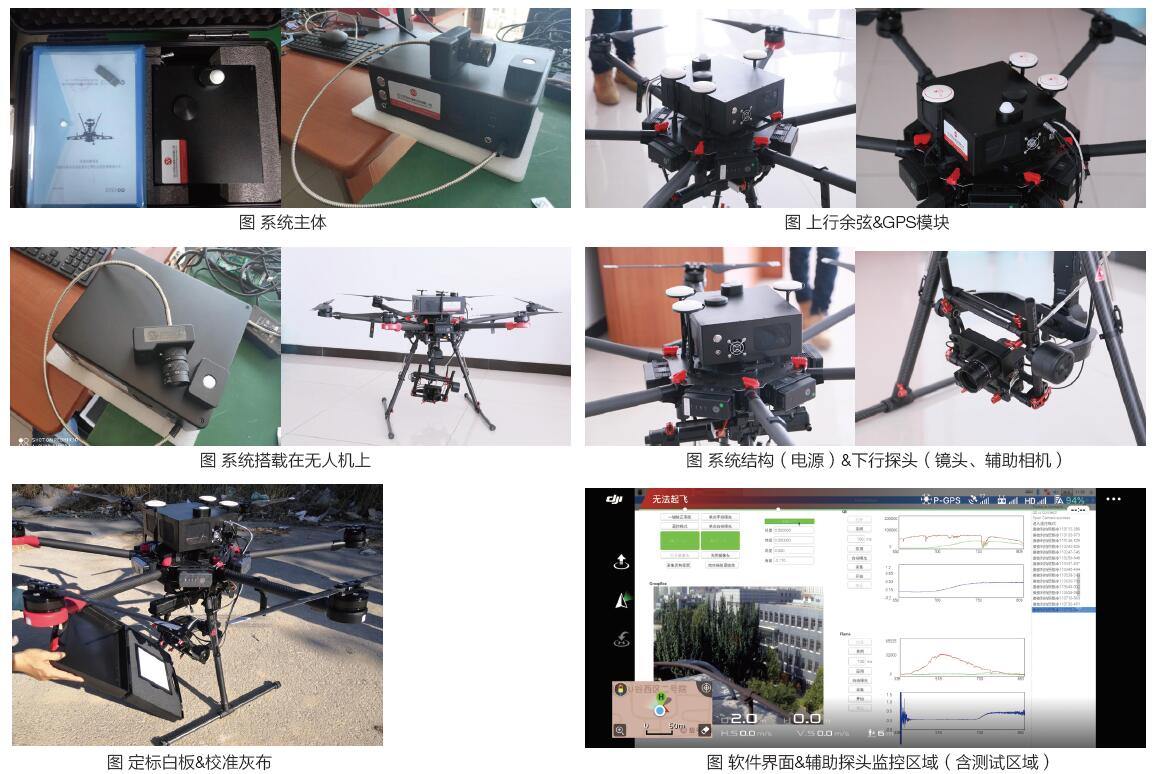
系統(tǒng)結(jié)構(gòu)介紹
模塊化集成���,結(jié)構(gòu)標(biāo)準(zhǔn)化�,無需調(diào)試�、調(diào)整系統(tǒng)結(jié)構(gòu),只需按照要求安裝在無人機(jī)上即可����,通過無線圖傳數(shù)據(jù)線實(shí)現(xiàn)系統(tǒng)與無人機(jī)、地面監(jiān)控平臺的互通�。通過無人機(jī)云臺給系統(tǒng)提供獨(dú)立的供電。下行光纖與獨(dú)立模塊固定便于成像鏡頭的切換�����,輔助相機(jī)集成在獨(dú)立模塊上����, 以便觀察、監(jiān)控采集區(qū)域�����。上行余弦校正功能實(shí)現(xiàn)模塊化���,實(shí)時(shí)采集太陽光照信號�,其透過率高,勻化效果好��,適應(yīng)波段范圍廣����。GPS 信息可以精準(zhǔn)定位采集區(qū)域的位置信息。
技術(shù)優(yōu)勢
-
系統(tǒng)集成度高;
-
系統(tǒng)操控性好����,操作簡單;
-
輔助監(jiān)控��,精準(zhǔn)定位采集區(qū)域�;
-
一鍵采集;
-
反射�、熒光光譜顯示及輸出;
-
定點(diǎn)巡航�����;
-
**輻射定標(biāo)�;
-
實(shí)時(shí)太陽光余弦校正模塊����;
-
GPS模塊�����;
-
35mm/50mm成像鏡頭及裸光纖模式切換��;
-
特殊光纖結(jié)構(gòu)��,快速完成上行下行信號的切換�,確保上下行實(shí)現(xiàn)同步采集��;
-
可無人機(jī)�����、地面兩用���;
-
高清圖傳數(shù)傳一體結(jié)構(gòu)確保對系統(tǒng)控制(操控�����、數(shù)據(jù)回傳等)�;
-
多種數(shù)據(jù)處理模型��;

